
Программирование Beckhoff TwinCAT 3: практическое руководство для инженеров, переходящих с традиционных ПЛК.
Инженер, посвятивший десять лет разработке лестничной логики для платформ Allen Bradley и Siemens, впервые открывает TwinCAT 3 и зависает. Дерево проекта находится внутри Visual Studio. Файлы C++ делят пространство с кодом ПЛК. Нет слотов шасси для настройки, нет каталога оборудования для просмотра. Ядро реального времени устанавливается как драйвер Windows вместе с веб-браузером. Это программирование Beckhoff TwinCAT 3 — подход к промышленному управлению, ориентированный на программное обеспечение. Переход непрост, но в итоге вы получаете платформу с возможностями, недоступными для традиционных ПЛК.
TwinCAT 3 (технология управления и автоматизации Windows) превращает любой ПК под управлением Windows в ПЛК и контроллер движения реального времени. В отличие от традиционных платформ, где среда выполнения находится на проприетарном оборудовании, TwinCAT 3 изолирует выделенные ядра ЦП от Windows с помощью драйвера ядра реального времени — планирование на уровне аппаратного обеспечения, а не виртуализация.
Среда разработки TwinCAT 3 XAE интегрируется в Microsoft Visual Studio в качестве расширения оболочки. Проект ПЛК находится внутри стандартного решения .sln. Система контроля версий работает через Git. Несколько программистов могут работать одновременно. Для инженеров, привыкших к Studio 5000 или TIA Portal, эта IDE воспринимается как среда разработки программного обеспечения — потому что она ею и является.
Архитектура полностью выходит за рамки стандарта IEC 61131-3. Модули на C++ и MATLAB/Simulink компилируются как нативные задачи реального времени вместе с кодом ПЛК, совместно используя память через TcCOM (TwinCAT Component Object Model). В качестве полевой шины используется EtherCAT — детерминированный протокол Beckhoff, который позволяет последовательно соединять тысячи терминалов ввода-вывода по одному кабелю с временем цикла менее миллисекунды. Отсутствует именование устройств PROFINET, файлы GSDML, сторонние инструменты для настройки приводов.
Программный стек: TwinCAT 3 XAE (разработка), TwinCAT 3 XAR (выполнение в реальном времени) и ядро реального времени. Разработка бесплатна. Вы можете писать, компилировать и моделировать полноценные машинные программы на обычном ноутбуке без какого-либо оборудования Beckhoff.
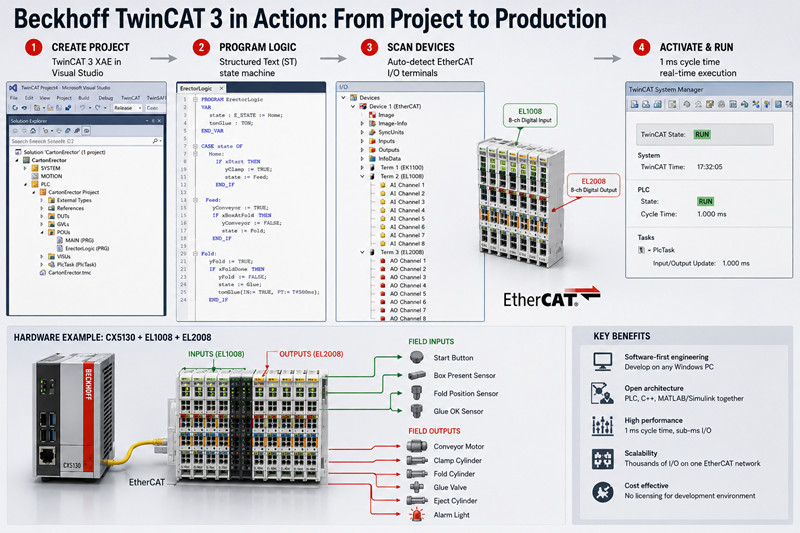
Компания-интегратор упаковочной отрасли в Джидде внедрила систему управления сборкой картонных коробок, используя встроенный ПК CX5130, 8-канальные цифровые входы EL1008 и 8-канальные цифровые выходы EL2008. Весь проект — от установки до циклической работы выходов — занял один день.
Шаг 1 — Установите TwinCAT 3 XAE. Загрузите его с веб-сайта Beckhoff. Установщик добавит панель инструментов TwinCAT в Visual Studio и установит драйвер ядра реального времени. Поддерживаются оболочки VS 2017, 2019 и 2022.
Шаг 2 — Создайте проект. Файл → Создать → Проект → "Проект TwinCAT". Решение содержит узел ПЛК, узел SYSTEM для конфигурации в реальном времени и узел ввода-вывода для устройств EtherCAT. Целевая архитектура x86 для встраиваемых ПК, таких как CX5130, x64 для более новых IPC.
Шаг 3 — Выберите язык программирования. Щелкните правой кнопкой мыши узел ПЛК и добавьте проект ПЛК. По умолчанию Beckhoff использует структурированный текстовый язык (ST), и большинство программистов переходят на него, поскольку ST гораздо лучше обрабатывает массивы, конечные автоматы и сложную логику, чем лестничная логика. Тем не менее, диаграмма непрерывных функций (CFC) — графический язык свободной формы, где вы размещаете блоки на холсте и рисуете сигнальные провода, — идеально подходит для контуров управления технологическими процессами. Лестничная логика (LD) остается доступной для дискретных блокировок, которые необходимы группам технического обслуживания для устранения неполадок.
Для устройства сборки картонных коробок инженер написал конечный автомат на языке ST с состояниями для «Домой», «Подача», «Складывание», «Склеивание» и «Выброс». Каждое состояние назначало выходные сигналы микросхеме EL2008 и считывало входные сигналы с микросхемы EL1008.
Шаг 4 — Сканирование устройств EtherCAT. Щелкните правой кнопкой мыши «Устройства» в дереве ввода/вывода и выберите «Сканировать». TwinCAT 3 автоматически обнаружит каждый подключенный терминал, привод и блок ввода/вывода. EL1008 отобразится как 8-канальный входной терминал. EL2008 отобразится как 8-канальный выходной терминал. Свяжите каналы терминала с переменными ПЛК, перетащив их в объявление переменной.
Шаг 5 — Активация конфигурации. Нажмите «Активировать конфигурацию» на панели инструментов. TwinCAT 3 компилирует код ПЛК, создает конфигурацию в реальном времени и загружает все в среду выполнения. Нажмите «Войти», выберите «Режим выполнения», и CX5130 запустит логику ПЛК с заданным временем цикла — обычно 1 мс.
Единственная загвоздка: ноутбук не мог связаться с CX5130, потому что сетевой идентификатор AMS не был маршрутизирован. Добавление сетевого идентификатора ноутбука через инструмент маршрутизатора TwinCAT (значок на панели задач) решило проблему менее чем за две минуты.
Главное отличие TwinCAT 3 от всех традиционных платформ ПЛК: нативный C++. Вы добавляете модуль C++ непосредственно в проект реального времени, пишете стандартный код C++ с расширениями для работы в реальном времени, и он работает как объект TcCOM на том же изолированном ядре, что и ПЛК, — разделяя память через указатели с нулевой задержкой.
Немецкий производитель упаковки использовал это для проведения проверки крышек бутылок на основе OpenCV с точностью 400 ppm. Модуль машинного зрения на C++ обменивается результатами «пройдено/не пройдено» с конечным автоматом ПЛК через общую структуру. Традиционный подход — внешнее межпроцессное взаимодействие через OPC UA — добавил бы задержку в 10-50 мс и потребовал бы обслуживания целой дополнительной сетевой линии связи.
Целевое устройство TE1400 экспортирует модели Simulink в виде модулей TcCOM. Инженер-технолог разрабатывает каскад ПИД-регуляторов, нажимает кнопку «Сгенерировать код», и модель компилируется в объект реального времени в проекте TwinCAT 3. Программист ПЛК сопоставляет входные и выходные сигналы модели с реальными терминалами ввода/вывода. На водоочистной станции в ОАЭ это использовалось для алгоритма дозирования коагуляции — датчики мутности и pH подключены к аналоговым входам EL3024, а выходные сигналы модели управляют аналоговыми выходами EL4024, которые подаются на дозирующие насосы. Полная интеграция: один день.
NC PTP обеспечивает стандартное позиционирование «точка-точка» с трапецеидальными или S-образными профилями — для конвейеров, линейных актуаторов, поворотного позиционирования. TwinCAT CNC — это полнофункциональное ядро числового управления, поддерживающее G-код, 5-осевую кинематику, компенсацию радиуса инструмента и предварительное планирование. Итальянский цех ЧПУ выполняет 5-осевую обработку на TwinCAT CNC с сервоприводами AX5000 с циклами интерполяции 0,1 мс.
HMI TwinCAT (TE2000) предоставляет панели управления HTML5/JavaScript с IPC Beckhoff. Любое устройство с браузером — панельный ПК, планшет, смартфон — отображает те же экраны. Связь между сервером HMI и ПЛК осуществляется по протоколу ADS через локальный маршрутизатор AMS с задержкой менее миллисекунды. Не требуется никакого фирменного оборудования для панелей.
TwinCAT 3 привязывает отдельные задачи к конкретным изолированным ядрам с отключенным вытеснением. Типичная компоновка четырехъядерного CX2040: ядро 1 запускает конечный автомат ПЛК за 1 мс, ядро 2 запускает NC PTP за 0,5 мс, ядро 3 запускает модуль машинного зрения на C++ за 5 мс, а ядро 0 обрабатывает Windows. Если какая-либо задача реального времени превышает свой цикл, TwinCAT сообщает о нарушении и переходит в настраиваемое состояние ошибки. Для высокоскоростной упаковки или интерполяторов ЧПУ ручная изоляция ядер устраняет дрожание, которое могло бы дестабилизировать машину.
Лицензии TwinCAT 3 приобретаются единовременно за каждое целевое устройство. TC1200 (только для ПЛК, IEC 61131-3) стоит приблизительно 700 долларов США для CX5130. TC1250 добавляет возможность управления движением NC PTP. TC1300 открывает доступ к C++. Полный пакет для CX2040 стоит 3000–4000 долларов США. Инженерная среда бесплатна для разработки и моделирования.
Встраиваемые ПК: CX7000 (начальный уровень, около 400 долларов), серия CX2000 (1500–4000 долларов), ультракомпактный IPC C6030 (от 2000 долларов). Терминалы ввода/вывода, такие как EL1008 и EL2008, стоят 80–120 долларов за модуль. Стандартные сроки поставки по каталогу составляют 1–3 недели.
Ознакомьтесь с встраиваемыми ПК Beckhoff, терминалами EtherCAT, а также решениями для лицензирования и ПЛК на сайте tztechio.com.
В: Можно ли использовать TwinCAT 3 на обычном ноутбуке для разработки?
Да. TwinCAT 3 XAE устанавливается на любую машину с Windows 10/11 x64. Ядро реального времени работает в локальном режиме с использованием изолированного планирования ЦП. Вы можете писать, компилировать и моделировать полноценные программы для ПЛК, C++ и управления движением без оборудования Beckhoff. Для моделирования ввода-вывода напишите короткую подпрограмму ST, генерирующую обратную связь от датчиков. Для управления движением включите режим моделирования осей в конфигурации SYSTEM.
В: TwinCAT 3 сложнее освоить, чем Studio 5000 или TIA Portal?
Если вы раньше использовали только специализированные IDE для ПЛК, то освоение среды Visual Studio потребует некоторого времени. Однако процесс сканирования ввода-вывода проще, чем каталог оборудования TIA Portal, и инженеры, знакомые со структурированным текстом и основными методами работы с программным обеспечением (контроль версий, отладка, область видимости переменных), обычно находят TwinCAT 3 интуитивно понятным в течение первой недели. Подсказка F1 от Beckhoff является исчерпывающей и учитывает контекст.
В: Мне нужен компьютер Beckhoff IPC, или я могу использовать компьютер стороннего производителя?
Программа работает на любом ПК с Windows и архитектурой x86, но Beckhoff проверяет работу в реальном времени только на собственном оборудовании. Использование ПК сторонних производителей сопряжено с риском возникновения сбоев из-за проблем с чипсетом, управлением питанием BIOS или драйверами. Разрабатывайте и моделируйте на любом ноутбуке. Для производственных целей используйте IPC от Beckhoff — разница в стоимости незначительна по сравнению с отладкой непроверенного оборудования.
В: Можно ли сочетать лестничную логику и структурированный текст в одном проекте?
Да. Один проект ПЛК может содержать PRG, FB и FC в любой комбинации ST, LD, FBD и CFC. Лестничная подпрограмма может вызывать функциональный блок ST. Диаграмма CFC может ссылаться на лестничные сети. Компиляция и компоновка не зависят от языка программирования.
В: Поддерживает ли TwinCAT 3 протоколы OPC UA и MQTT для Индустрии 4.0?
Да. TF6100 предоставляет функциональность OPC UA-сервера, отображая символы ПЛК в виде настраиваемых узлов. TF6701 добавляет функцию публикации/подписки по протоколу MQTT. Оба работают как модули TcCOM в режиме реального времени, независимо от служб Windows.
В: Как происходит обновление прошивки и программного обеспечения на работающем компьютере?
TwinCAT 3 поддерживает внесение изменений в режиме онлайн — модификация кода ПЛК, добавление переменных, настройка конфигурации задач, пока среда выполнения остается в режиме работы. Структурные изменения (новые устройства EtherCAT, изменения времени цикла, модули C++) требуют активации конфигурации с кратковременным контролируемым перезапуском. Для круглосуточных процессов доступны резервные конфигурации TwinCAT с автоматическим переключением на резервный сервер.

Пожалуйста, читайте дальше, оставайтесь в курсе, подписывайтесь, и мы будем рады, если вы поделитесь с нами своим мнением.



Кроме того, с вашего разрешения мы хотим разместить файлы cookie, чтобы сделать ваше взаимодействие с slOC более личным. Для этого мы используем аналитические и рекламные файлы cookie. С помощью этих файлов cookie мы и третьи лица можем отслеживать и собирать информацию о вашем поведении в Интернете внутри и за пределами super-instrument.com. При этом мы и третьи лица адаптируем сайт super-instrument.com и рекламу к вашим интересам. Нажимая «Принять», вы соглашаетесь с этим. Если вы откажетесь, мы будем использовать только необходимые файлы cookie, и вы, к сожалению, не будете получать персонализированный контент. Пожалуйста, посетите нашу политику в отношении файлов cookie, чтобы получить дополнительную информацию или изменить свое согласие в будущем.
Accept and continue Decline cookies












